

La Histerectomía Total Laparoscópica (HTL) es una cirugía realizada para la extracción del útero de un modo mini invasivo. Después de la cesárea, es la cirugía ginecológica que más se realiza; constituye de este modo la segunda causa mundial de procedimientos quirúrgicos que se realizan en la mujer. En Argentina, el acceso al material quirúrgico es escaso y costoso, y en la mayoría de los casos un material descartable que se debería reutilizar.
INTRODUCCIÓN
Este artículo es un breve resumen de un proyecto interdisciplinar. Comenzó con una propuesta por querer aplicar a becas en facultades de la Universidad Nacional del Litoral, lo que llevó una búsqueda de opciones hasta dar con la correcta y permitir la vinculación por medio de una cientibeca, que se prolongó como tesina de grado y hoy nos permite poder celebrar el patentamiento del producto.
¿Qué es la histerectomía? Es la resección quirúrgica del útero. La HTL es, entonces, la cirugía en la cual se retira el útero, pero la resección del órgano se realiza laparoscópicamente, es decir, por pequeñas incisiones abdominales. La mayor incidencia es por patologías benignas, como fibromas o sangrados anormales, y se encuentra en el grupo etario de 40 a 60 años. Para que una histerectomía laparoscópica sea exitosa debe utilizarse un manipulador uterino para mover el órgano y no dañar otros aledaños a el.
IDENTIFICACIÓN DE OPORTUNIDAD DE DISEÑO
La discusión surge al momento de elegir la forma correcta para realizar la intervención. Si bien la industria médica lleva a una instrumentalización y complejización de los procesos, existen vías más eficientes y económicas a la hora de la intervención. El instrumental a utilizar en estas cirugías, como en la gran mayoría, se clasifica en descartables y esterilizables. En Latinoamérica, el acceso laparoscópico es restringido y Argentina es un país de ingresos medio–bajos en relación con otros. ¿Qué quiere decir esto? Que el instrumental que ingresa al país suele ser de media–baja calidad. Y acá es donde comienza la controversia de materiales de alto costo versus bajo costo.
La problemática definida fue la ineficiencia del manipulador uterino, instrumento necesario para realizar la histerectomía totalmente laparoscópica, producto que actualmente se consigue descartable a altos costos y es utilizado reiteradas veces. Como objetivo de este proyecto se buscó, a partir de la observación, comprender y analizar la cirugía, desarrollar un dispositivo que cumpla correctamente con los requerimientos para la intervención, evitar fallas que detengan o prolonguen la misma e integrar distintas metodologías. De ese modo, se logró priorizar al usuario, atendiendo sus necesidades y requerimientos reales definidos por el contexto en que se desenvuelve el cirujano.
INVESTIGACIÓN
La histerectomía, como en toda cirugía, consiste en una serie de pasos y procesos a seguir. En los puntos en los que se encontraron fallas fueron los pertinentes al momento de ocupar el manipulador uterino descartable V–Care utilizado en la actualidad. Esto definió la franja donde aplicar y rediseñar para mejorar la interacción del cirujano, que es el usuario del instrumento, con el manipulador con la finalidad de beneficiar a la paciente siempre.
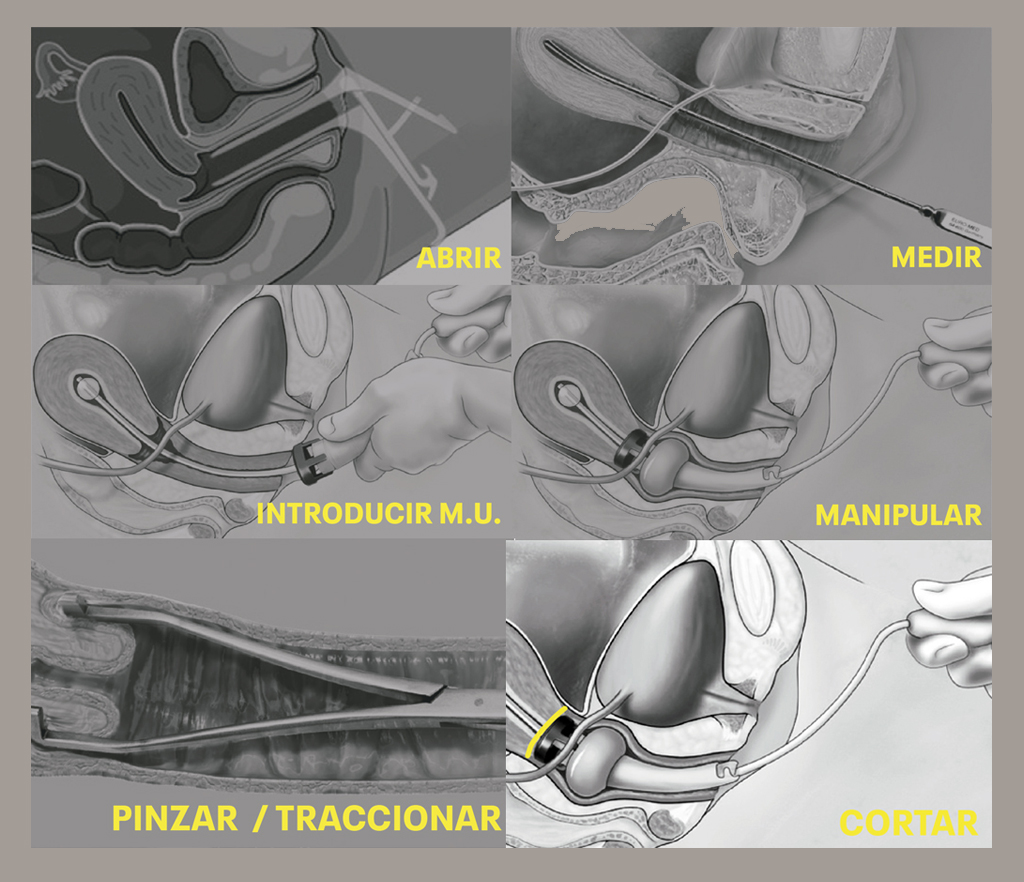
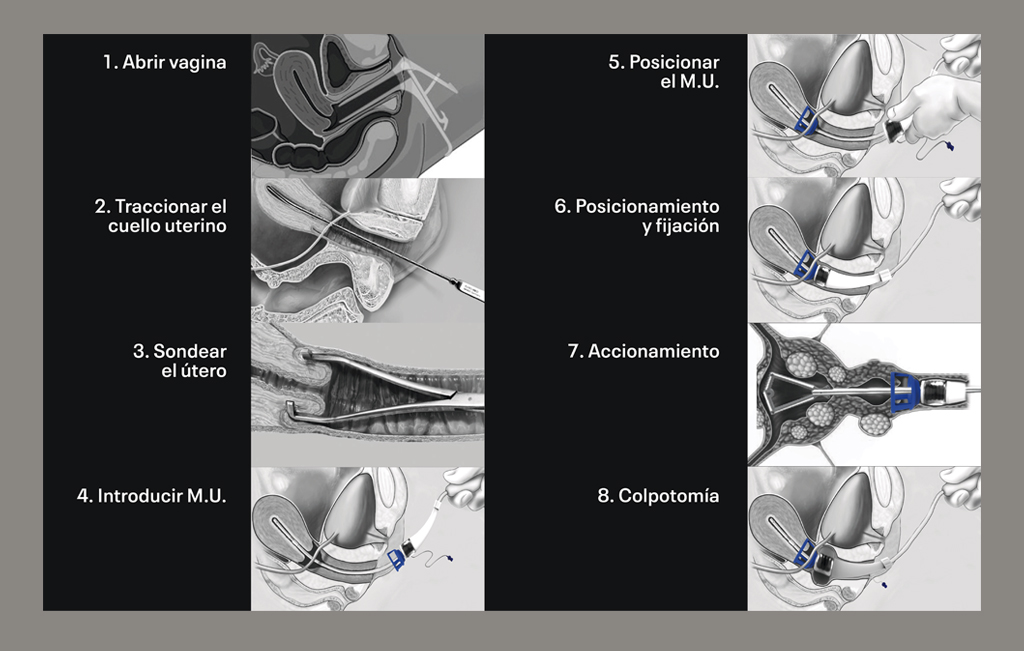
La cirugía consiste en abrir el canal vaginal, medir la cavidad uterina, tomar el cuello uterino para traccionarlo e introducir el manipulador uterino (ver Figura 2). Una vez posicionado el manipulador se accionan sus mecanismos para, si es que posee alguno, sellar el interior y facilitar la colpotomía, proceso para cortar y cauterizar el útero. La finalidad del manipulador es movilizar el útero para realizar la colpotomía correctamente sin dañar órganos cercanos a él.
Se estudió la ergonomía del puesto de trabajo ya que las laparoscopías requieren destrezas para trabajar en un sentido y espacio, mientras se mira e interacciona en otro. Esto repercute en la concentración del cirujano y en el vínculo con los participantes del entorno. Quien trabaja por abdomen solicita al que ocupa el manipulador distintas posiciones y maniobras para evitar el daño de órganos aledaños al punto de corte. El quirófano está preparado y acomodado para la visión correcta del cirujano que interviene en la zona abdominal, dejando en desventaja a quien ocupa el manipulador. Esto hace que el usuario del instrumento adopte posturas inadecuadas y dañinas, que los esfuerzos musculo–esqueléticos requeridos sean mayores y que los movimientos generen daños por cargas continuas.
Para concluir la instancia de investigación, resaltamos que en Argentina se accede a escaso material quirúrgico, siempre a valores dispares y restringido por normativas que impiden una amplia variedad de productos. La morfología del manipulador que se ocupa complica la intervención, dificulta su maniobrabilidad produciendo daños y lesiones en la paciente. La forma de la punta del dispositivo genera que se perfore el útero, esto hace que se pierdan los gases internos necesarios; los mecanismos de oclusión no son funcionales; el mango es extremadamente pequeño para ser tomado correctamente; el espacio que tiene el cirujano es limitado. No se tienen en cuenta posibles daños, errores o fallas; hay que accionar con ingenio para solucionar y seguir con la intervención.
IMPACTO
Se buscó brindar una solución deseable, viable económicamente y factible de producir, con la finalidad de mejorar la calidad de vida de los médicos y brindar máxima eficiencia al manipulador uterino, con un objetivo final que es la salud de la paciente.
Proyectamos para que el cirujano pueda sentirse cómodo y seguro en su entorno de trabajo; para que el material no sea un impedimento, sino un facilitador para que la intervención sea exitosa. El proyecto permitió imaginar un futuro ideal a partir del impacto diseñado.
DISEÑO EN DETALLE
Los manipuladores se dividen en subsistemas. Los que definimos y estudiamos en profundidad fueron: el mecanismo adaptable al útero, la copa colpotomía, la copa para el neumoperitoneo y el mango. Se pensaron y desarrollaron opciones para cada subsistema, siempre bajo una interacción constante en un grupo interdisciplinario que nos permitió buscar las mejores opciones para cada finalidad deseada. Se optó por la más adecuada y viable para el contexto y la experiencia de los usuarios: un manipulador para HTL esterilizable, que se adapte a las múltiples anatomías de los organismos de las mujeres, que mantenga el neumoperitoneo durante la colpotomía y tenga un agarre adecuado.
En el mecanismo de la punta (ver Figura 3), el V–Care tiene una curvatura y una punta erróneas que dañan el sistema reproductor femenino, perdiendo el aire interno tan necesario. Se buscó un mecanismo que sea adaptable a la anatomía femenina para evitar daños y dolores postoperatorios. Se hizo una búsqueda exhaustiva para encontrar mecanismos o analogías que nos permitan transformar morfologías filares en volumétricas, ya que el canal vaginal es tubular, pero el útero posee una morfología compleja. Fue un gran desafío ya que las piezas debían ser de tamaño extremadamente pequeño y permitir una apertura y cierre. Se ingenió un diseño que se adapte al útero para evitar perforarlo. Lo dificultoso fue encontrar un formato que nos permita el accionamiento de la punta desde el exterior del organismo. Se analizaron varios mecanismos ya aprehendidos para todos para así facilitar su modo de uso. Debía encontrarse cómo empujar el sistema para abrirlo y luego cerrarlo. Se logró diseñar un mecanismo que con un sistema hidráulico acciona un doble diamante en forma de acordeón con las medidas adecuadas para calzar en los cuernos uterinos. De este modo no se daña el órgano, se evita su perforación y se impide perder el neumoperitoneo.

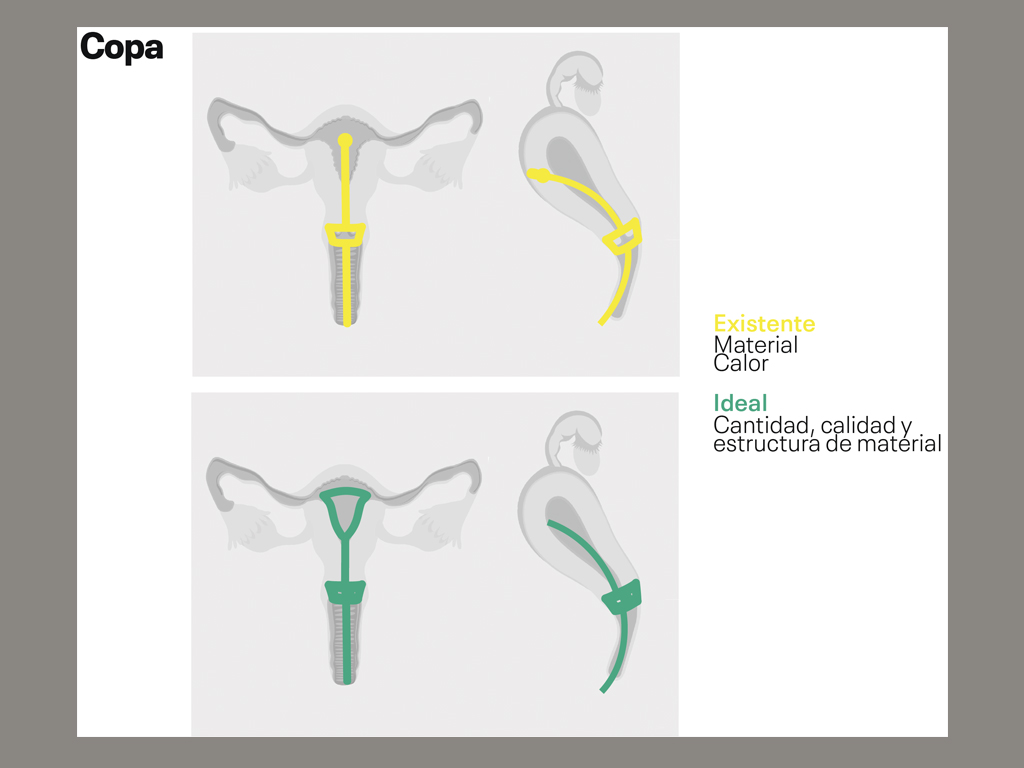
Para la copa (ver Figura 4) se buscó disminuir la cantidad de material y cambiarlo, ya que el del V–Care se quema y derrite con el bisturí armónico y pueden quedar pequeñas partículas dentro del organismo de la paciente. Para su morfología, era necesario acompañar la del fondo del saco vaginal, que es el lugar preciso donde se calza y realiza la colpotomía. Los tamaños y dimensiones de los órganos varían en cada paciente, por ello se buscó dimensiones y formas que puedan abarcar la mayor variedad posible. Se le diseñó un refuerzo para afirmar aún más el órgano y se tuvo en cuenta la dirección de los esfuerzos al momento de definir los ángulos de inclinación. Asimismo, se le realizó un canal, en su perímetro superior, como guía por donde el cirujano realizará la colpotomía.
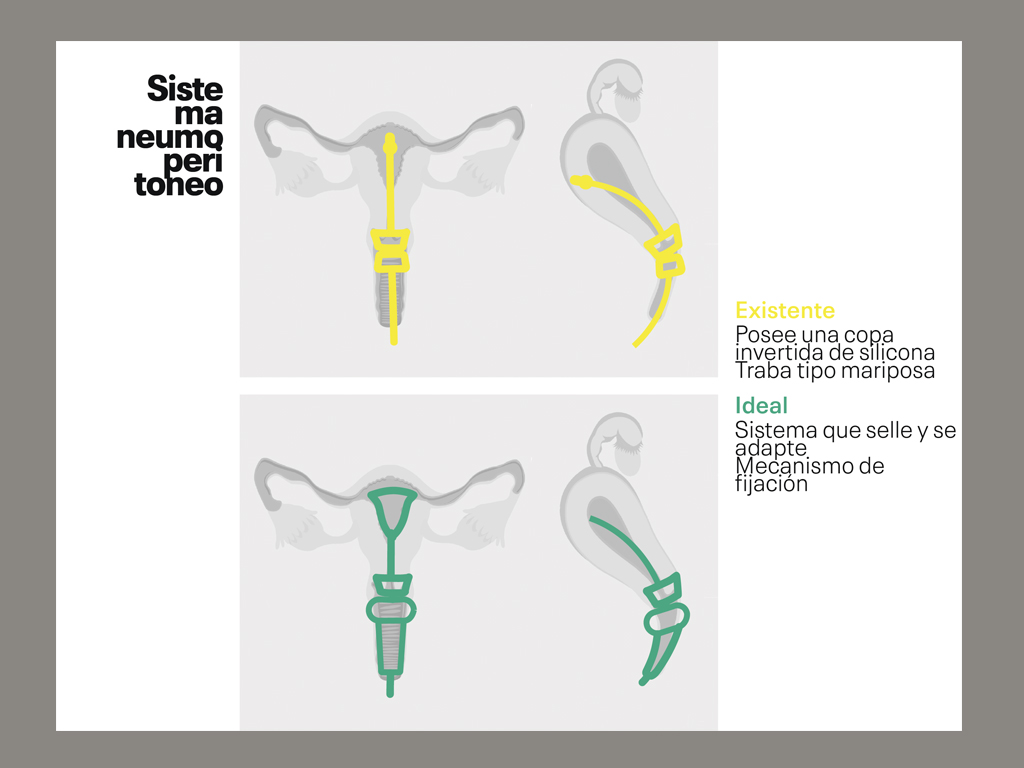
El sistema neumoperitoneo (ver Figura 5) es sumamente importante ya que se requieren mantener los gases internos para evitar flacidez del órgano durante la intervención. El mecanismo del V–Care no es funcional. Se buscó un mecanismo accionable para sellar con firmeza la vagina ya que la anatomía del sistema reproductor femenino es sumamente compleja, más aún en estas ocasiones donde los órganos están sobredimensionados por las patologías. Por ello fue un gran desafío encontrar un formato que se adapte a la multiplicidad de organismos y tamaños. La idea partió de una pieza que pueda ser posicionada en cualquier punto del manipulador y que tenga un medio de fijación anatómico que selle la vagina. Se optó por colocar un balón que se insufle y esto permite que se adapte el tamaño de la vagina en el punto requerido. Otro gran desafío fue definir un sistema o mecanismo para fijar este conjunto en el punto exacto para cada paciente. Para esto se aplicaron distintos mecanismos de fijación ya conocidos porque debía ser eficiente y rápido; se planteó una rosca que ejerza fuerzas perpendiculares de apriete sobre unas aletas y así fije el conjunto en el punto requerido. Este sistema permite sellar la vagina, mantener el neumoperitoneo interno y manipular correctamente el útero sin perder los gases.
El sistema de agarre del V–Care (ver Figura 6) es extremadamente pequeño y genera daños en el usuario; se buscó repensarlo hacia uno ergonómico y se tuvo en cuenta el modo de agarre, los esfuerzos, la posición adoptada por el usuario y cómo mejorar estas a partir de una correcta manipulación. Las variantes morfológicas en esta pieza fueron infinitas. Logramos definir el instrumental tras hacer un estudio de la huella del usuario y definir cuál era la más adecuada para el ángulo necesario y los esfuerzos aplicados a lo largo de la intervención. Se le dieron ángulos y curvatura para un mejor agarre, sobre relieves para aumentar la fricción y evitar que se resbale al maniobrar. Internamente se reforzó con costillas para poder soportar los esfuerzos de presión que ejerce el usuario al momento de mover el organismo y los grandes pesos que esto requiere.
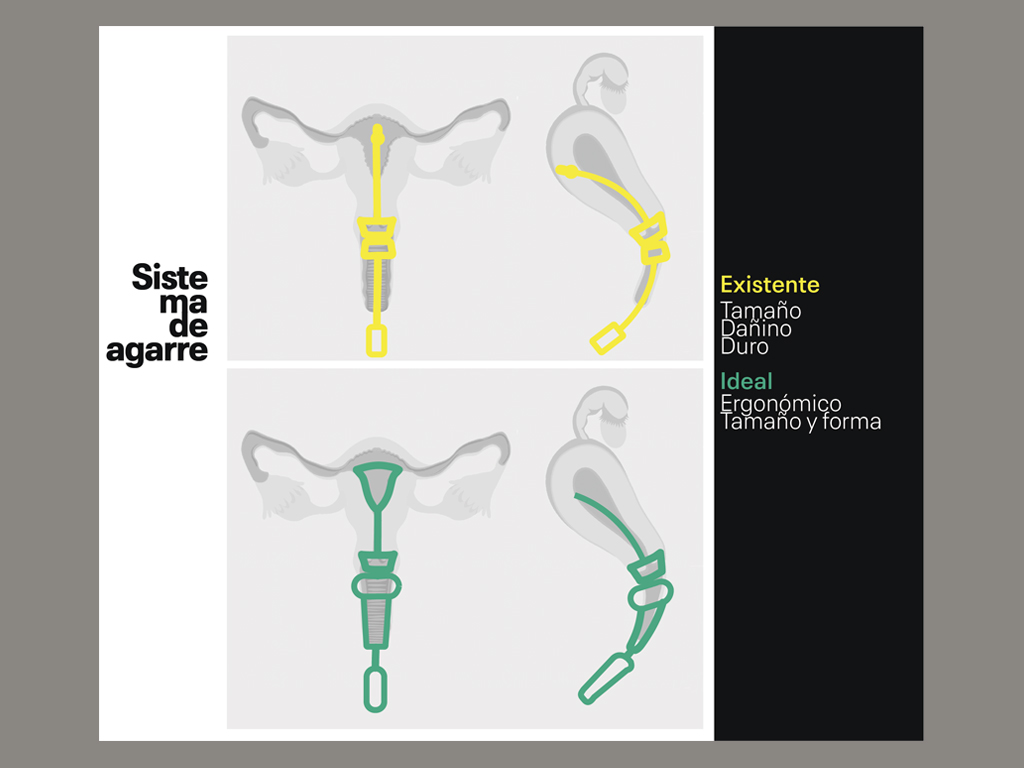
(Der.) Figura 6. Sistema de agarre o mango. La primera figura representa el sistema reproductor femenino con el manipulador uterino V–Care y la segunda figura muestra la representación de un manipulador uterino ideal.
Se proyectó un dispositivo esterilizable, eficaz y seguro para la histerectomía total laparoscópica que permite una exposición y control superior del útero y mejor acceso a la anatomía pélvica.
La materialidad de las piezas fue una gran decisión, tanto por el difícil acceso a algunas materias primas en Argentina como por sus precios dispares. Las carcasas del mango y del sistema neumoperitoneo fueron definidas en polipropileno de alta densidad, material de fácil acceso. La varilla principal, como las piezas del mecanismo de la punta, se proyectaron en acero inoxidable AISI 316 L, que es una aleación austenítica de cromo–níquel con molibdeno que aumenta la resistencia y corrosión ante la sangre y químicos. La copa se proyectó en silicona de uso médico. Al ser flexible se adapta y acomoda correctamente en el canal vaginal. Las piezas restantes son estándares, adquiridas en el mercado local.
El ciclo de vida de un producto va desde su ideación y producción hasta el tratamiento que se haga con sus desechos, sea reutilizable o no. Desde un inicio se planteó un producto esterilizable y cuya vida útil sea lo más larga posible. Todo el proceso de investigación y diseño se forjó en base a esta premisa. No se pudo dejar de lado el proceso de esterilización, que puede dañar o desgastar las piezas del manipulador. Por esto, se proyectó por subsistemas, para permitir que la pieza dañada pueda ser reemplazada sin la necesidad de descartar el producto por completo.
En países subdesarrollados no se obtienen valores exactos ni se lleva registro claro de las intervenciones realizadas. Esto dificultó estimar una demanda con mayor exactitud. En el centro médico privado donde se realizó la investigación se lleva a cabo un promedio de 70 histerectomías anuales. Teniendo en cuenta que en espacios públicos estos números son mayores, se sacó un promedio de 2 a 3 HTL semanales por centro médico.
VALIDACIÓN
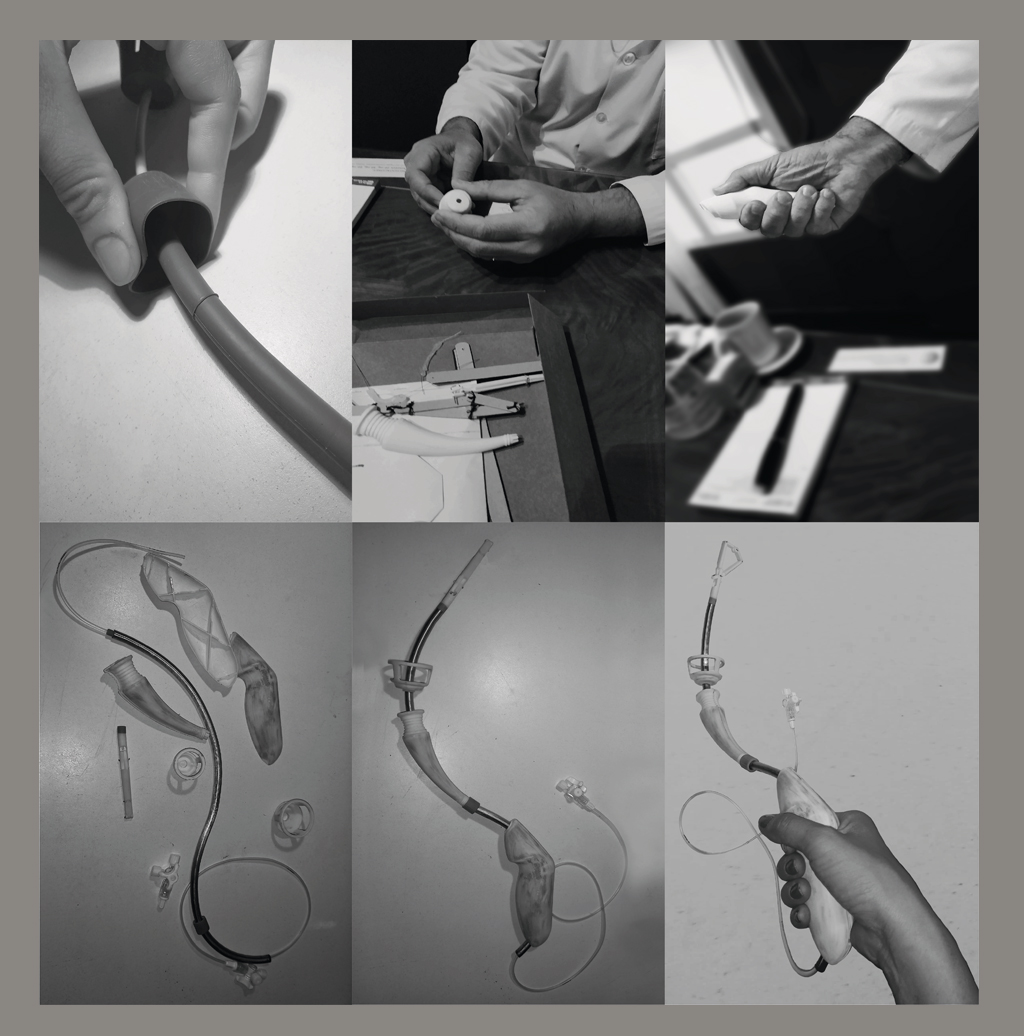
La validación del manipulador no fue una etapa en sí (ver Figura 8); fue un proceso de trabajo en conjunto, con interacción constante en un grupo interdisciplinario. Cada cambio, cada mejora, cada opción fue registrada, maquetada y validada por usuarios y especialistas. En todo este proceso las piezas sufrieron grandes mutaciones a lo largo de todo el proyecto hasta llegar a las más adecuadas para cada subsistema. El trabajo en conjunto con especialistas y usuarios permitió llegar a un producto final lo más acertado posible. Las maquetas y prototipos fueron mejorando su fidelidad hasta llegar a la final. El maquetado permitió realizar muchas mejoras, es sumamente importante materializar las ideas y no quedarse solo con dibujos o modelados virtuales. Manipular los prototipos, sentir las texturas, los pesos, los acabados superficiales, ayuda a empatizar aún más con el usuario desde el lugar de diseñador.
El manipulador llegó a la instancia de maquetación y prototipado en fidelidad alta. Al ser un contexto de sanidad y esterilidad, no se pudo testear la eficiencia del producto en una cirugía.
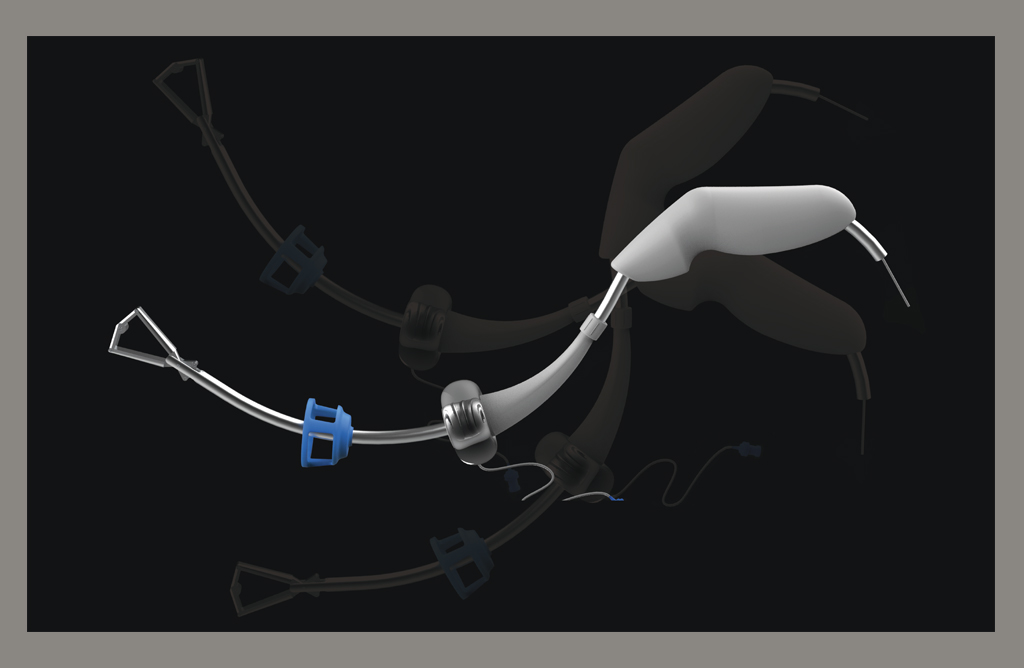
(Der.) Figura 9. Manipulador Uterino proyectado y diseñado.
CONCLUSIONES
Basados en una necesidad real fue sumamente importante y valioso haber logrado proyectar un instrumento accesible, esterilizable, de producción nacional. Es un producto funcional, su morfología es ergonómica para el usuario, facilita su modo de uso, los subsistemas cumplen con su funcionalidad beneficiando al usuario y mejora la intervención. Disminuye los dolores en el usuario por promover un correcto uso, agarre y manipulación, mejora la experiencia por comodidad y eficiencia. Su materialidad y formato permiten la esterilización completa, permite el armado y el desarmado con facilidad evitando errores. Al cumplir con sus requerimientos, impide que sea utilizado erróneamente y acorta tiempos en la histerectomía.
A partir de la identificación de la problemática, tras un largo proceso de investigación, trabajo de campo y desarrollo, se logró proyectar un producto nuevo, necesario, deseado y sobre todo viable gracias al ingenio de un grupo interdisciplinar que identificó los puntos de dolor, extrapolando mecanismos, procesos y materiales existentes a un nuevo producto.
Referencias bibliográficas
García Rodríguez, M.E. y García Basulto, M.J. Histerectomía vaginal. Apuntes históricos. Gaceta Médica Espirituana (2019).
Kranenburg, L. & Gossot, D. Ergonomic problems encountered during video assisted thoracic surgery. Minimally Invasive Therapy & Allied Technologies (2004).
Mondelo, P.R., Bombardo, P.B., Busquets, J.B. y Torada, E.G. Ergonomía 3: Diseño de puestos de trabajo (Vol. 3). Universitat Politecnica de Catalunya. Iniciativa Digital Politecnica (2004).
Quick, N.E., Gillette, J.C., Shapiro, R., Adrales, G.L., Gerlach, D. & Park, A.E. The effect of using laparoscopic instruments on muscle activation patterns during minimally invasive surgical training procedures. Surgical Endoscopy and Other Interventional Techniques (2003).
Sardiñas Ponce, R. La histerectomía laparoscópica y sus aspectos fundamentales. Revista Cubana de Cirugía (2015).

Victoria Gaviola
Licenciada en Diseño Industrial.
Becaria de investigación de 2019 a 2021.
Ayudante alumno en las asignaturas Introducción a Medios Digitales (2017), Materiales y Procesos I y II, y en Mobiliario Urbano.




{kind=link}